Transducers from the UK experts
Applied Measurements manufacture & supply strain gauge sensors & transducers











Applied Measurements supply superb quality strain gauge sensors, transducers & measurement systems to all industries, UK and Worldwide. From concept to implementation our specialist team is here to support you.
Precision, reliability, and expert transducer knowledge are what make Applied Measurements one of the UK’s leading transducer specialists and more importantly, what makes our customers come back to us time and time again.
Applied Measurements are ISO 9001:2015 Quality Management certified and all our superb-quality products come with a 3-year warranty.


Product Spotlight
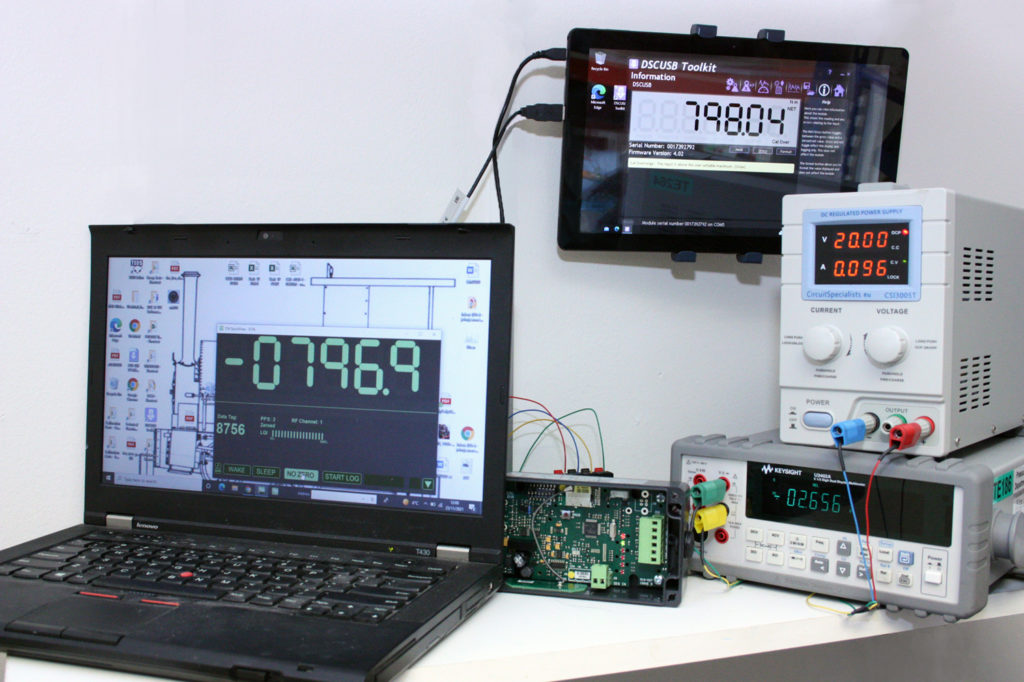
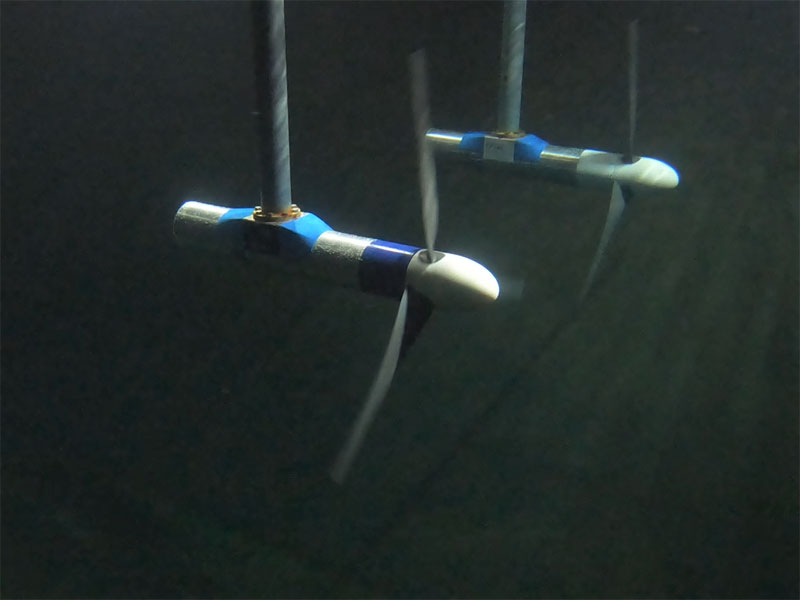
Applied Measurements Promise Precise Thrust & Torque Results in Tidal Turbine Testing
Read how our dual axis force and torque sensors was used in tidal testing by the University of Oxford. They aimed to understand how the spacing between tidal turbines and different control strategies affects the performance of tidal turbines.

Force and Torque Sensor | 2-Axis | Bi-Directional | DBBSS/TSF
0-50N/0-1Nm up to 0-250kN/0-2500Nm
From only £2,749